我国研制“触嗅一体智能仿生机械手”为灾后救援再添利器
在遭遇灾难或其他非常情况(含自然灾害、意外事故、突发危险事件等)时,获得实施解救的行动,人体发出的超低频电场可穿透钢筋混凝墙、钢板、木板、甚至水,因此,只要有生命迹象,不论其是否清醒、昏迷、身陷瓦砾堆或躲在集装箱中,均可用探测仪在最短时间内将其找到。
近日,上海微系统所与信息技术研究所研究人员,将MEMS嗅觉、触觉柔性传感器阵列与多模态机器学习算法融合,构建了仿星鼻鼹鼠触嗅一体智能机械手。该机械手手指触摸物体后可准确获取其局部微形貌、材质硬度和整体轮廓等关键特征,掌心可同步嗅出物体“指纹”气味,进一步通过仿生触嗅联觉 (BOT) 机器学习神经网络实时处理,最终完成识别人体、确认部位、判断掩埋状态、移开障碍物、闭环救援。
模仿生物的形态、结构和控制原理设计制造出的功能更集中、效率更高并具有生物特征的机械。研究仿生机械的学科称为仿生机械学,它是20世纪60年代末期由生物学、生物力学、医学、机械工程、控制论和电子技术等学科相互渗透、结合而形成的一门边缘学科。仿生机械研究的主要领域有生物力学、控制体和机器人。把生物系统中可能应用的优越结构和物理学的特性结合使用,人类就可能得到在某些性能上比自然界形成的体系更为完善的仿生机械。
仿生机械研究的主要领域有生物力学、控制体和机器人。生物力学研究生命的力学现象和规律,包括生体材料力学和生体流体力学,生体机械力学和生体流体力学。控制体和机器人是根据从生物了解到的知识建造的工程技术系统。其中用人脑控制的称为控制体(如肌电假手、装具);用计算机控制的称为机器人。仿生机械学的主要研究课题有拟人型机械手、步行机、假肢以及模仿鸟类、昆虫和鱼类等生物的各种机械。

机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点。
机械手是最 早出现的工业机器人,也是最 早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
机械手主要由执行机构、驱动机构和控制系统三大部分组成。手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。
运动机构的升降、伸缩、旋转等独立运动方式,称为机械手的自由度。为了抓取空间中任意位置和方位的物体,需有6个自由度。自由度是机械手设计的关键参数。自由度越多,机械手的灵活性越大,通用性越广,其结构也越复杂。一般专用机械手有2~3个自由度。控制系统是通过对机械手每个自由度的电机的控制,来完成特定动作。同时接收传感器反馈的信息,形成稳定的闭环控制。控制系统的核心通常是由单片机或dsp等微控制芯片构成,通过对其编程实现所要功能。
机器学习是一门多领域交叉学科,涉及概率论、统计学、逼近论、凸分析、算法复杂度理论等多门学科。专门研究计算机怎样模拟或实现人类的学习行为,以获取新的知识或技能,重新组织已有的知识结构使之不断改善自身的性能。它是人工智能核心,是使计算机具有智能的根本途径。机器学习是人工智能及模式识别领域的共同研究热点,其理论和方法已被广泛应用于解决工程应用和科学领域的复杂问题。传统机器学习的研究方向主要包括决策树、随机森林、人工神经网络、贝叶斯学习等方面的研究。
模拟人类实际神经网络的数学方法问世以来,人们已慢慢习惯了把这种人工神经网络直接称为神经网络。神经网络在系统辨识、模式识别、智能控制等领域有着广泛而吸引人的前景,特别在智能控制中,人们对神经网络的自学习功能尤其感兴趣,并且把神经网络这一重要特点看作是解决自动控制中控制器适应能力这个难题的关键钥匙之一。
新闻来源:海微系统与信息技术研究所
标签:触嗅一体智能仿生机械手
全部评论(0条)
推荐阅读
-
- 我国研制“触嗅一体智能仿生机械手”为灾后救援再添利器
- 近日,上海微系统所与信息技术研究所研究人员,将MEMS嗅觉、触觉柔性传感器阵列与多模态机器学习算法融合,构建了仿星鼻鼹鼠触嗅一体智能机械手。
-
- 珀金埃尔默多款新品发布,为分析检测技术再添利器
- 珀金埃尔默多款新品发布,为分析检测技术再添利器
-

- 我国风云气象卫星监测土耳其震区恶劣天气为救援助力
- 目前,土耳其地震灾区温度在0℃以下,出现降雪等恶劣天气,阻碍援工作进行。
-
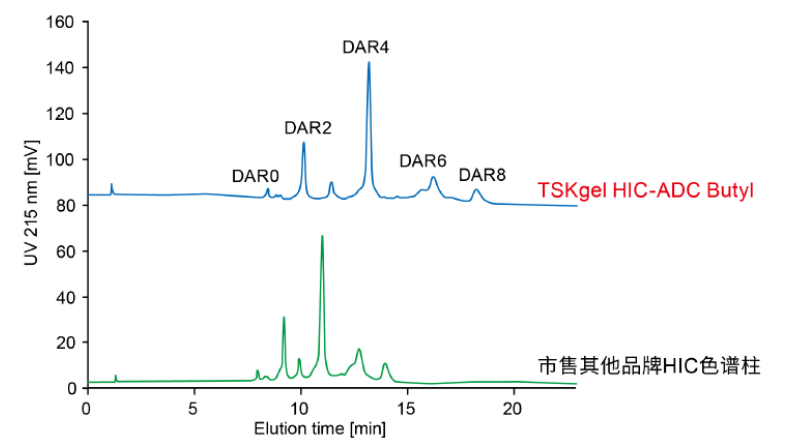
- 新品发布|东曹疏水色谱柱再添利器,显著提升ADC药物DAR分离度
- 东曹生命科学(Tosoh Bioscience)是全 球知名的色谱分离解决方案供应商,近日宣布推出一款疏水(HIC)色谱柱新品——TSKgel HIC-ADC Butyl。
-
- 高效量子点太阳能面世电池储能再添利器 仪器行业如何跟上储能发展?
- 仪器仪表行业作为储能技术的重要支撑,需要紧跟储能发展步伐,不断提升技术创新和研发能力。 首先,仪器仪表行业可以加大对高效量子点太阳能技术研发的投入
-

- 我国成功研制全模拟光电智能芯片 工业仪器智能化转型成现实
- 我国科研团队在光电智能芯片领域取得重大突破,成功研制出世界头一款全模拟光电智能计算芯片(简称ACCEL)。 这一创新成果不仅为超高性能芯片的研发开辟了新路径,也使工业仪器仪表的智能化转型成为现实。
-

- 沃特世ACQUITY UPLC I-Class/Xevo TQ-XS IVD系统在中国获批,临床体外诊断应用再添利器
- 该系统专为要求严苛的UPLC-MS/MS定量分析而设计,采用沃特世开创性的StepWave XS离轴离子聚焦技术和UltraPerformance LC技术
-
- 【新品上市】MP再添三个重组蛋白产品!
- 人血清白蛋白(HSA)由肝脏合成,是人血浆中含量最高的蛋白,可作为载体运输脂肪酸、氨基酸等营养物质,同时能够
-
- 新品再现 | 红外发射率测量仪家族再添新成员
- 近日,我司红外发射率测量仪系列再添新品RLK656,自此我司共有6款红外发射率及红外辐射测量设备,欢迎新老客户咨询了解。











①本文由仪器网入驻的作者或注册的会员撰写并发布,观点仅代表作者本人,不代表仪器网立场。若内容侵犯到您的合法权益,请及时告诉,我们立即通知作者,并马上删除。
②凡本网注明"来源:仪器网"的所有作品,版权均属于仪器网,转载时须经本网同意,并请注明仪器网(www.yiqi.com)。
③本网转载并注明来源的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品来源,并自负版权等法律责任。
④若本站内容侵犯到您的合法权益,请及时告诉,我们马上修改或删除。邮箱:hezou_yiqi







参与评论
登录后参与评论