超酷!UCLA郑小雨教授Science:3D打印机器人超材料,可以感知环境、自主导航!

随着人工智能技术的进步,智能机器人产业如雨后春笋般蓬勃发展。实际上,“机器人”一词最 早出现在1921年卡雷尔·卡佩克(KarelCapek)创作的一部科幻剧中。
目前大多数机器人,无论其大小,通常都是通过一系列复杂的制造步骤构建的,这些步骤集成了肢体、电子和有源组件。与用提供不同功能的独立部件来建造机器人相比,用多功能超材料建造的机器人具有一定的优势。超材料是一种由重复图案组成的合成结构,旨在表现出理想的宏观特性。与大宗材料不同,超材料的行为受其工程结构的制约,而不是纯粹由其材料构成驱动。增材制造技术,如3D打印,已经加速了复杂的超材料的制造,其规模越来越小,功能也前所未有。传统上,制造机器人依赖于组装离散的执行器、传感器、微处理器和电源。机器人超材料通过在超材料的周期性结构中构思自主性来挑战这种模式。
从历史上看,超材料的研究主要集中在光学应用上,例如具有超出普通透镜和反射镜能力的可调谐光学特性的超材料。然而,近年来,研究人员越来越多地转向在其他领域采用这种设计原理。比如无需使用传动齿轮即可将线性运动转换为旋转的机械超材料,或能够按需调整刚度或变形等体积特性的镶嵌机器人群。创造机器人超材料的另一条途径是在结构中体现“机器人任务”。例如,人们可以设计一种超材料,其变形可以通过电信号进行控制。
鉴于此,最 新一期《Science》期刊在线发表了加州大学洛杉矶分校的郑小雨教授团队的新成果。该团队开发了一种新的设计策略和 3D 打印技术,可以一步构建机器人。第 一作者为崔华晨。
具体而言,作者开发了一种合理设计压电超材料的方法,该材料由无源、压电有源和导电相组成,可以执行一些机器人任务(Figure1)。所需的变形模式,例如扭曲,近似为一些通过结构的离散平面的运动。反过来,这些平面的允许运动将告知结构相、致动器和电极应如何在压电超材料内组织以产生目标运动。在经典的弹性理论中,弹性材料的变形以拉伸、压缩和剪切为特征。本文作者应用了微极弹性,通过在平移之上结合旋转来扩展经典弹性。这种方法能够更全面地评估压电超材料的宏观膨胀、剪切、扭曲和弯曲对其微结构、极化和施加的电场。
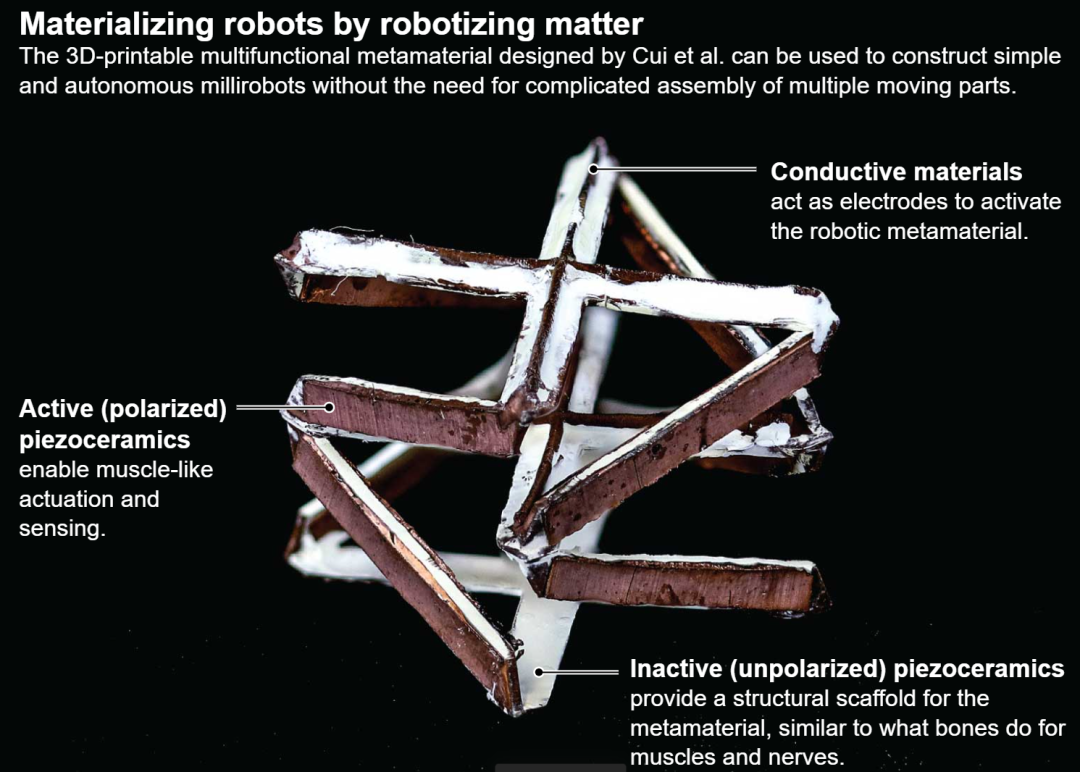
Figure 1. 示意图
【实验设计】
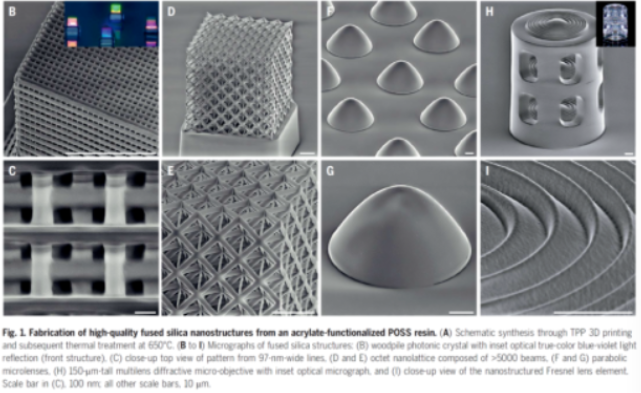
架构材料的核心概念是在 3D 单元拓扑中不受限制地放置材料,绕过天然晶体固有的限制或模仿它们以实现所需的特性。为此,作者引入了一种方便且强大的策略来构建 3D 空间中的压电活性、导电和结构相(图 1A)。因为现有的压电张量不足以描述所有的自由度,作者在 Cosserat 固体的基础上定义了广义压电张量来描述架构压电材料的应变转换(图 1B)。微结构的具体结构(晶胞)如图1C-1K所示。

图 1. 具有任意应变模式的机器人超材料的合理设计
【机器人超材料的增材制造】
作者开发了一种电荷程序化多材料增材制造技术,能够将压电活性相、结构相和导电相组装成复杂的3D微架构。首先,通过多材料3D打印系统(材料和方法)打印带负电荷的树脂和高负载的纳米粒子胶体,如图2A所示。然后将导电相选择性地沉积在带电树脂上,形成带有电极的 3D 微架构(图 2B)。此外,氧化铅用于提供液体密封和富铅环境,以抑 制 PZT 在高于 800°C 的温度下的铅蒸发(图 2D)。这种 3D 制造方法允许制造具有精确、微尺度 3D 结构和低孔隙率的压电活性材料(图 2E-2H)。总之,作者使用具有空间编程静电荷的多材料立体光刻系统,并在选定区域制造了装饰有导电金属和压电特性的3D陶瓷晶格。
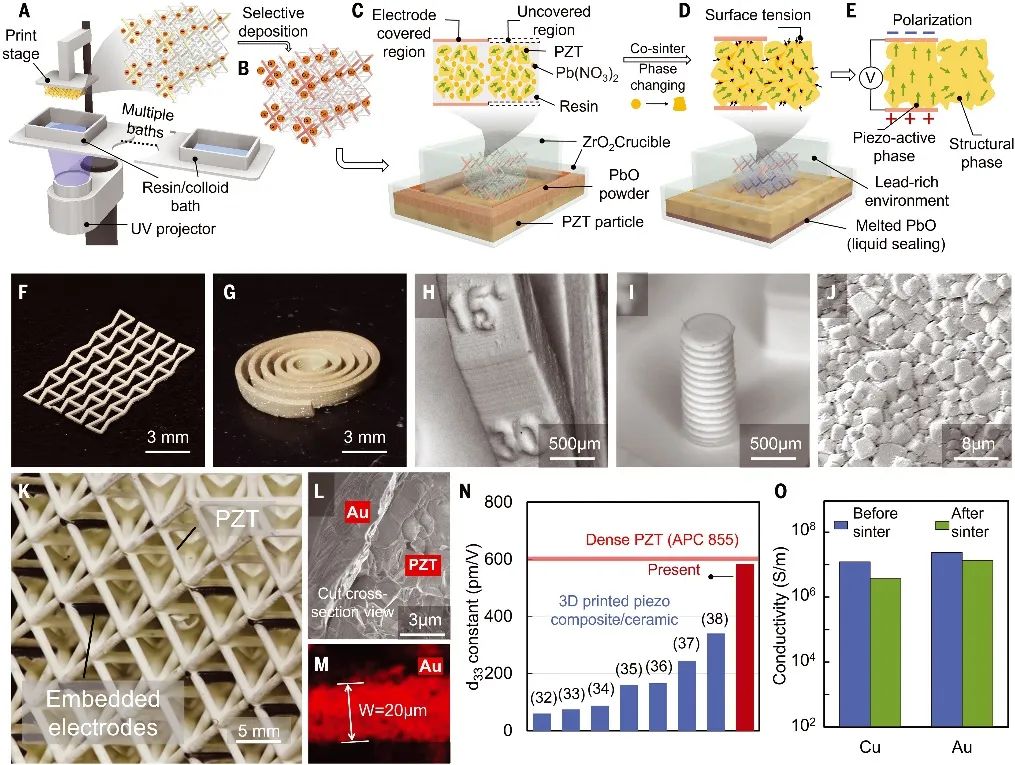
图 2. 多材料制造平台
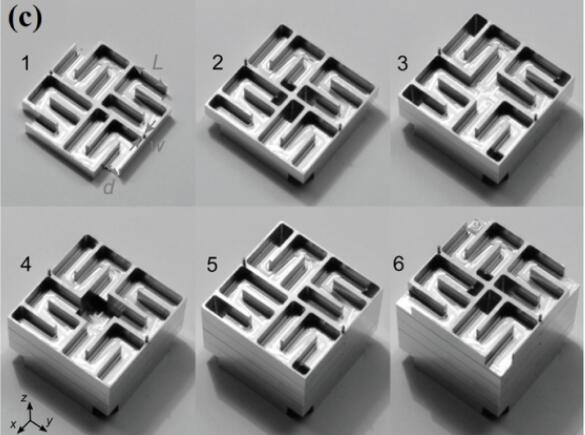
【多自由度放大和程序化应变】
由增材制造的机器人超材料可以使用电场到机械应变的双向转换来产生运动和传感。逆压电效应赋予机器人驱动能力,而直接和双向压电效应分别通过本体感受(自我监测)和外感受(接触检测和遥感)实现反馈控制。超材料的拓扑结构允许将电极直接放置在压电活性支柱上,从而产生更强的电场并放大驱动应变。
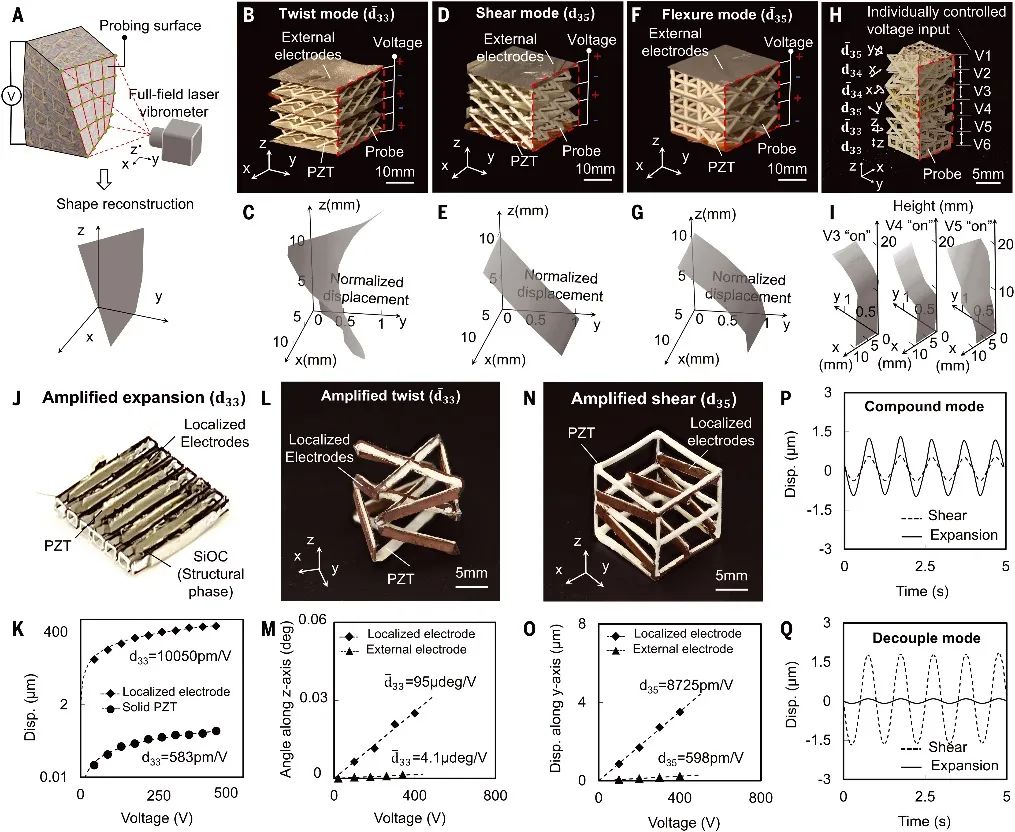
图 3. 机器人超材料设计的实验验证
同时,作者巧妙地将驱动和感知交织在一个轻巧的微型复合3D格子中,该格子可以四处移动并感知周围环境。然后,作者通过设计板载控制系统和电源,朝着不受束缚的实施迈出了一步。这种系统级集成虽然很少见,但可以充分挖掘现实世界场景中快速发展的机器人材料的全部潜力,并找出它们的缺点。考虑到这里讨论的移动压电超材料,压电活性元件的布线仍然是增强其多功能性的限制因素,而分配功率和分散控制仍然是需要克服的障碍。尽管存在这些限制,但作者证明,当移动性和不受约束的自主性不是必需的时,一块压电架构可以用作具有六个自由度的紧凑型3D打印机械手,即能够沿所有三个轴平移并围绕所有三个轴旋转。
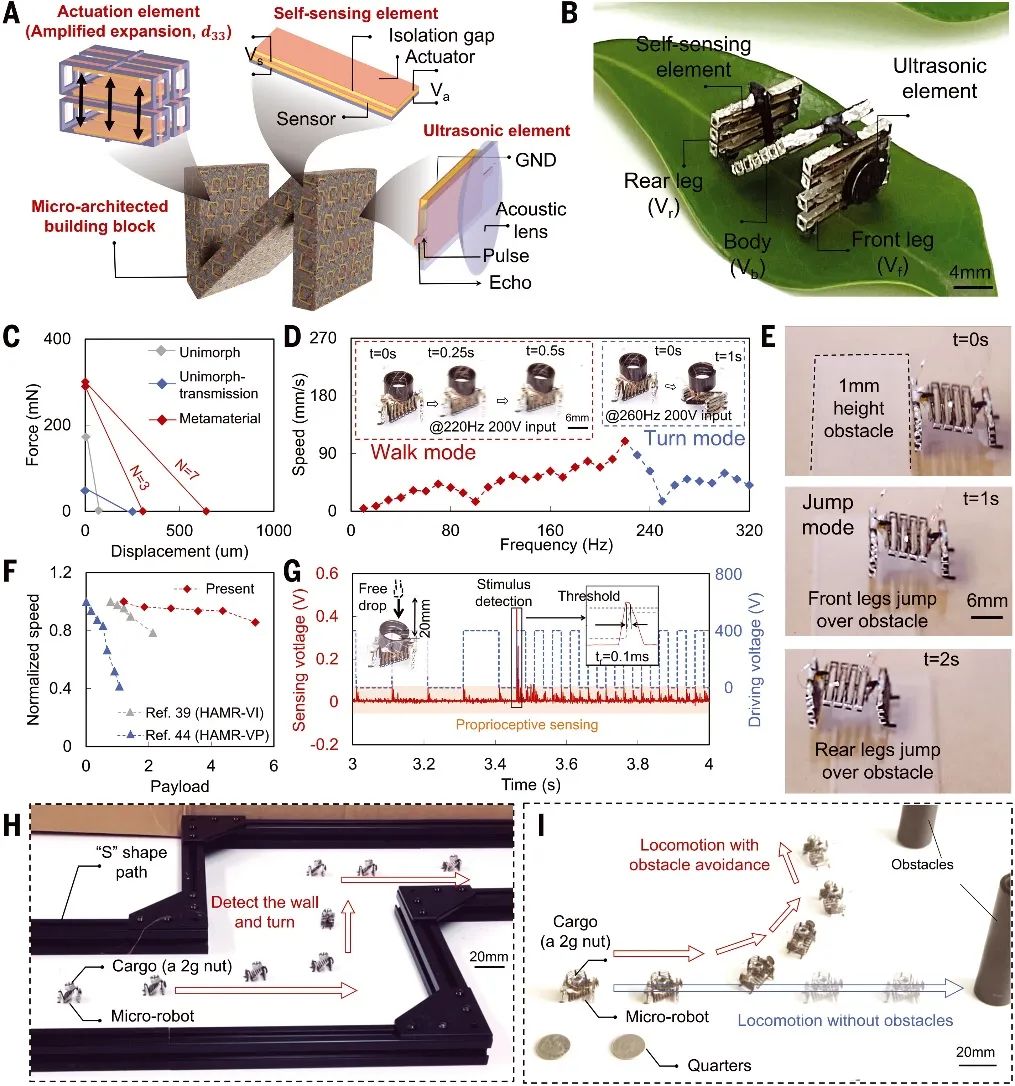
图 4. 刺激响应多模式移动微型机器人
【作者简介】
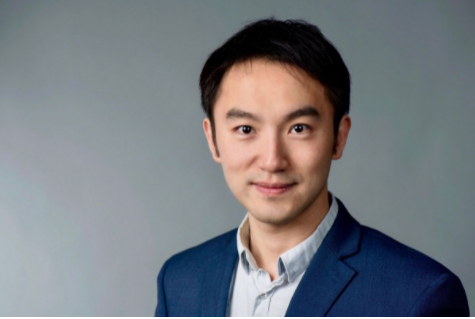
加州大学洛杉矶分校的Xiaoyu (Rayne) Zheng教授课题组从力学、光学和材料科学中汲取原理,开发下一代增材制造(3D打印)工艺、材料设计和合成方法,以创造具有可控拓扑结构、成分和多尺度特征的多功能材料和一体式设备。该课题组积极地将这些材料转移到电子、结构、机器人、能源储存和传导、到生物和保健的广泛应用中。Xiaoyu (Rayne) Zheng教授课题组在超轻、超 强和弹性材料的可扩展增材制造方法方面的工作被《麻省理工科技评论》的十大创新、《研发100》杂志、《科学》杂志和《自然材料》的封面所报道。
原文链接:
https://doi.org/10.1126/science.abn0090
摩方精密作为微纳3D打印的先行者和领 导 者,拥有全 球领先的超高精度打印系统,其面投影微立体光刻(PμSL)技术可应用于精密医疗器械、精密电子器件及众多科研领域。在三维复杂结构微加工领域,摩方团队拥有超过二十年的科研及工程实践经验。针对客户在新产品开发中可能出现的工艺和材料难题,摩方将持续提供简易高效的技术支持方案。
欢迎各位专家学者提供稿件(微纳3D打印相关研究成果、前沿技术、学术交流)。投稿邮箱:bmf@bmftec.cn。
该文章转载的目的在于传递更多信息,如涉及作品内容、版权或其它问题,请于我司联系,我们将在第 一时间删除内容!
最受关注文章 TOP 5
Science:仿南洋杉3D毛细锯齿结构表面流体自主择向
北京航空航天大学蒋永刚课题组《Soft Robotics》:基于PμSL 3D打印技术制备的波形人工触须传感器用于不同流体的分析
沈阳工业大学张贺课题组《Micromachines》:基于PμSL 3D打印的微混合器芯片用于研究单元连接对混合性能的影响
东京大学竹内教授课题组《Lab on a Chip》封面文章:3D打印微流控器件制备双层脂膜
西南科大李国强/海河实验室曹墨源《先进功能材料》:3D打印多仿生槽锥刺结构实现跨气-液界面微油滴高效定向操控

全部评论(0条)
推荐阅读
-

- 超酷!UCLA郑小雨教授Science:3D打印机器人超材料,可以感知环境、自主导航!
- 目前大多数机器人,无论其大小,通常都是通过一系列复杂的制造步骤构建的,这些步骤集成了肢体、电子和有源组件。
-
- 《Science》重磅:3D打印陶瓷烧结只需10秒钟,速度提升1000倍
- 陶瓷3D打印越来越得到业界的重视。然而,无论是基于光固化、FDM,还是喷射等不同3D打印技术所制造的陶瓷零件,都需要后期烧结这个必不可少的工艺环节。
-

- 香港城市大学陆洋教授课题组《ACS Appl. Mater. Interfaces》: 基于3D打印的仿生高韧机械超材料
- 通过利用摩方精密开发的基于面投影微立体光刻(PμSL)3D打印技术(摩方精密nanoArch P130, S140超高精度3D打印系统),实现了仿生机械超材料单元在微米尺度的高分辨制备。
-

- 南洋理工大学Hu Xiao教授课题组《Int. J. Mech. Sci.》: 3D打印板晶格机械超材料的卓越压缩性能
- 机械超材料是一类人为设计的微观物理结构组成的、具有特殊机械性能的超材料。
-

- 遇见实验室:手术机器人、3D 打印,骨科研究新方向!
- Eppendorf 联合丁香园共同打造「遇见实验室」专栏,对话国内顶 尖实验室科研人员,捕捉他们开拓创新、功课难题的瞬间。
-

- 《先进材料》:3D打印技术悄悄地杀入发泡材料
- 如何精准的控制微观泡孔形貌和宏观泡沫结构目前仍然是一个难点。
-

- 【Nature/Science期刊集锦】关于3D打印相关的研究报导
- 使用L-PBF打印了AICoCrFeNi2.1的双相纳米层状高熵合金(HEAs),其表现出约1.3GPa的高屈服强度和约14%的大均匀伸长率,远超其他先进的金属3D打印材料。
-

- 高精密3D打印:未来微型机器人研制的重要手段
- 现阶段,微型机器人大多还处于实验室或原型开发阶段,因此,现在所见到的微型机器人较为简单,但同时也能执行一些基本的操作指令,离实用化还有相当长的距离。
-

- 微电子所采用忆阻器感知技术有效提升机器人自主巡航避障
- 该神经元能够感知外界的模拟信号并转化成实时的动态脉冲信号,实现了对外界信号进行感知并传输的基本功能。
-
- 3D打印在压电材料方面的应用
- 压电效应的产生是晶胞中正负离子在外界条件作用下出现相对位移,使得正负电荷的中心不再重合,导致晶体发生宏观极化。
-

- 高精密3D打印亮相工业3D打印展
- 摩方在现场展示的microArchTM 系列3D打印系统为超精密增材制造量身定做,具有全 球领先的超高打印精度(2μm / 10μm/ 25μm),以及高精密的加工公差控制能力
-
- 客户成就 | 玻璃材料的双光子3D打印
- 上月,卡尔斯鲁厄理工纳米技术研究所的J. Bauer课题组使用Nanoscribe双光子三维微纳加工系统,自制新型熔融石英光刻胶,加工出了高精度微光器件与力学超材料,该文献发表在Science正刊。
-

- 什么是3D打印柔性材料?主要用在哪些地方?
- 3D打印柔性材料可以通过构建不同形状、尺寸和密度的镂空晶格实现复杂的外观形态;
-
- 西工大官操团队《Small》综述:3D打印石墨烯基超材料的最 新发展和应用
- 不同类型超材料的结构设计,包括机械超材料,电磁超材料(人造和仿生),声学超材料(主动和被动),主要关注点是结构设计对不同物理性能的影响,而不考虑组成材料的因素。
-
- 《Adv. Mater. Technol.》:3D打印超材料骨架的无铅压电复合材料用于机电能量转换
- 钛酸钡超材料-PDMS复合材料具有高灵敏度,可以应用于不同的传感器,如运动计步、重量感应和心跳监测等。
-

- 碳纤维打印突破微重力环境,长征五号B火箭完成在轨3D打印
- 我国首次太空3D打印实验,也是国际上第 一次在太空中开展连续纤维增强复合材料的3D打印实验。


①本文由仪器网入驻的作者或注册的会员撰写并发布,观点仅代表作者本人,不代表仪器网立场。若内容侵犯到您的合法权益,请及时告诉,我们立即通知作者,并马上删除。
②凡本网注明"来源:仪器网"的所有作品,版权均属于仪器网,转载时须经本网同意,并请注明仪器网(www.yiqi.com)。
③本网转载并注明来源的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品来源,并自负版权等法律责任。
④若本站内容侵犯到您的合法权益,请及时告诉,我们马上修改或删除。邮箱:hezou_yiqi






参与评论
登录后参与评论