精工品质,致力精准应用|HXP系列六轴并联机器人

HXP 系列
六轴并联机器人
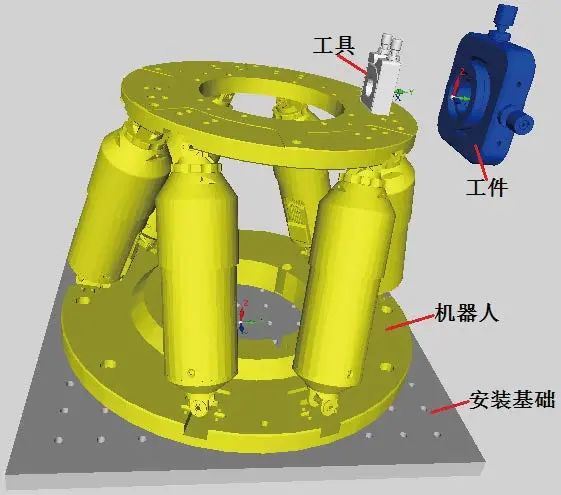
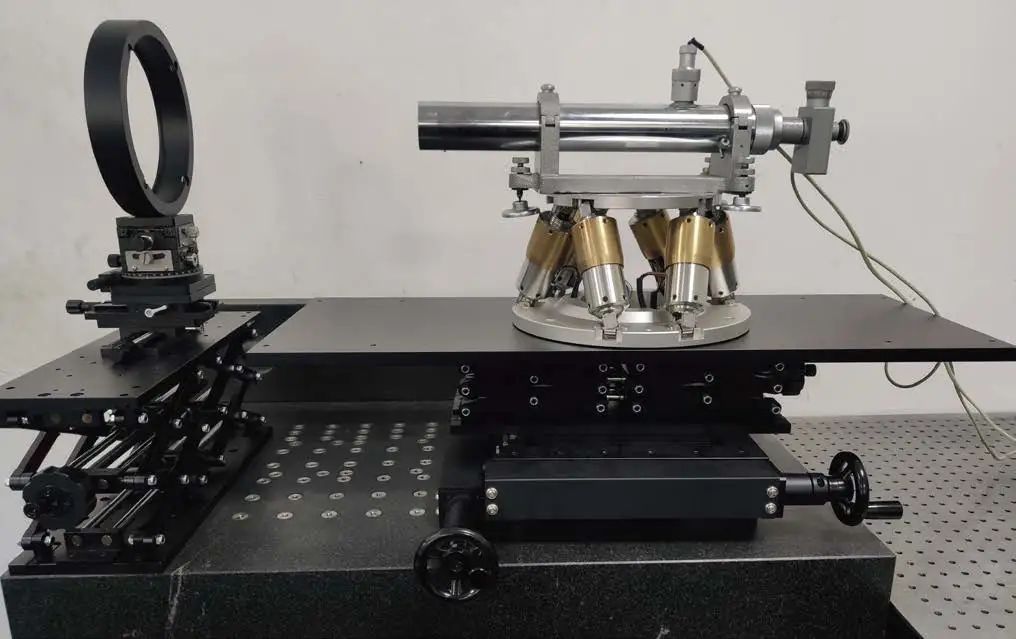
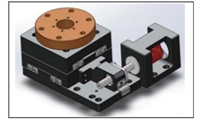
HXP 系列六轴并联机器人系统主要用于高精度的六自由度调整,尤其适合于空间精密对位、微小器件加工和装配、光通信器件调芯、晶片检验等场合。
机械主体采用六个推杆+ 双虎克铰结构,具有刚性强、重复定位精度高、可任意位置安装等特点。推杆采用绝 对定位型电机驱动,失电后保持位置信息,重启后无需归零。电机驱动系统采用标准工业总线EtherCAT 进行通信,可靠性高、通信效率高,兼容市场上主流运动控制系统。
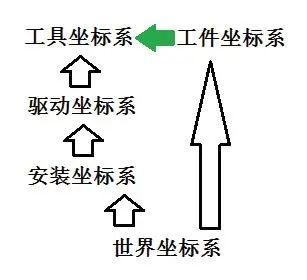
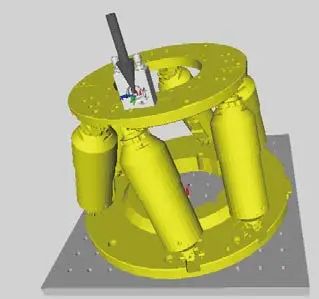
控制系统与软件支持各种欧拉角空间变换制式、支持机器人运行空间坐标系管理(包括世界坐标系、工件坐标系(64 组)、机器人安装坐标系、机器人驱动坐标系、机器人工具坐标系(64 组)的设置和转换)、支持载荷模拟、具有机器人空间校准功能、支持3D 姿态仿真模拟、示教方案等功能。提供二次开发包,可以根据实际应用,整合成系统设备。
产品链接:https://www.zolix.com.cn/Product_desc/1245_1545.html
咨询电话:010-56370168 13810146393
功能简介
坐标系体系建立
机器人控制系统具有空间仿真功能,可以模拟机器人在真实环境下的使用情况,并将最 终用户从繁重的坐标系换算中解放出来。
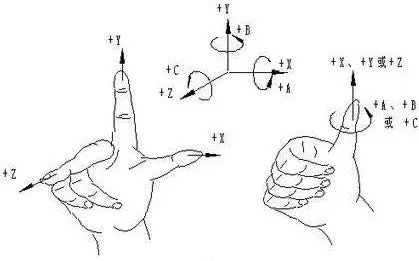
位置表述
笛卡尔坐标系来表述位置坐标,欧拉角表述指向
支持12种欧拉角顺序
内、外旋转两种制式
运动控制
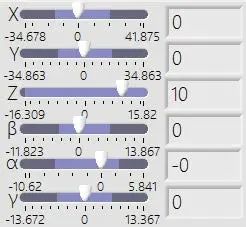
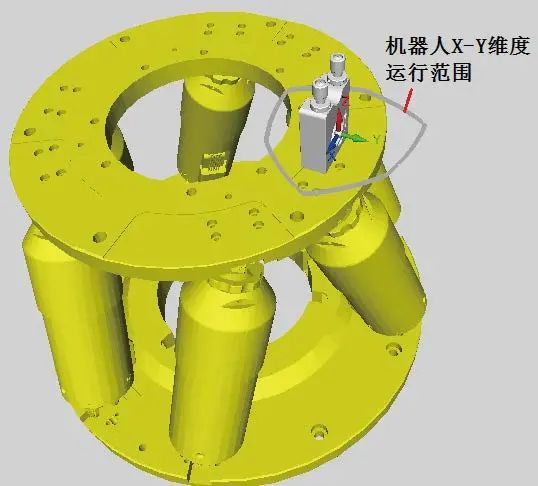
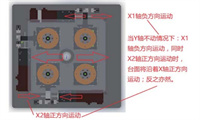
运动范围
机器人的运动范围与当前机器人姿态、工具坐标系位置相关,不是一个定值。用户操作单维运动的时候可以直接预览出运动范围。也可以生成运动范围曲线,投射到预览模型上,方便操作。
定点运动
定点运动有绝 对运动和相对运动两种方式,方便用户选择。


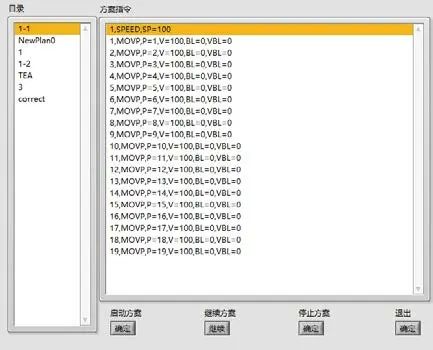
运行方案
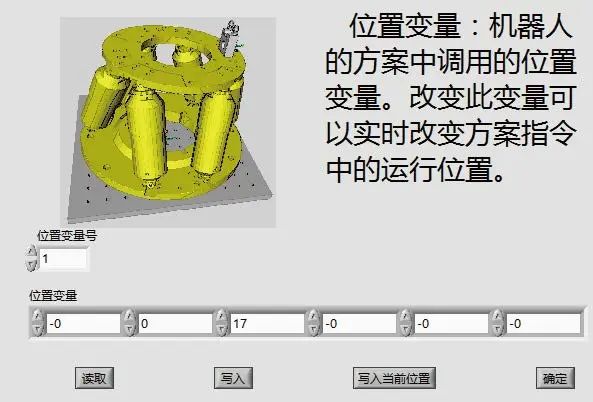
控制系统支持将指定位置坐标存储到位置变量中。位置坐标可以来源于人工输入、手动示教、定点运动。通过指定上述位置坐标的顺序和速度,就可以完成一个指令方案的编订。
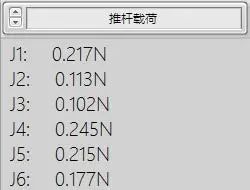
载荷模拟
软件可以根据用户设置的受力点的位置和大小,计算出六根推杆具体载荷。随着机器人的运行姿态变化,随时更新数据。
应用方向
光学检测
在非球面镜面形检测的场合(如:半导体硅片或光学反射镜平面度的测量)对样品进行六个自由度的调整。
主动对位设备(Active Alignment)的应用
摄像头是由一组镜片组成的复杂光学系统。每个组件的安装都需要多个维度的精度需求。
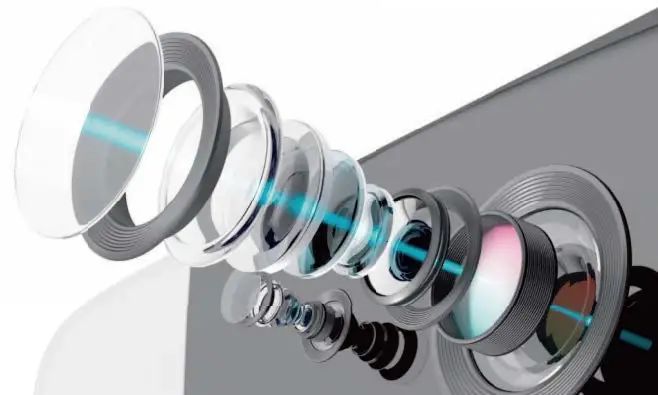
六轴并联机器人加持着镜头组件,以很高的定位精度在六个维度上分别进行对位扫描,寻找成像清晰度最 高的安装位置。
光通信器件调芯
六轴并联机器人加持光通信器件进行多维度调整,通过光功率反馈寻找最 高效率的耦合位置。
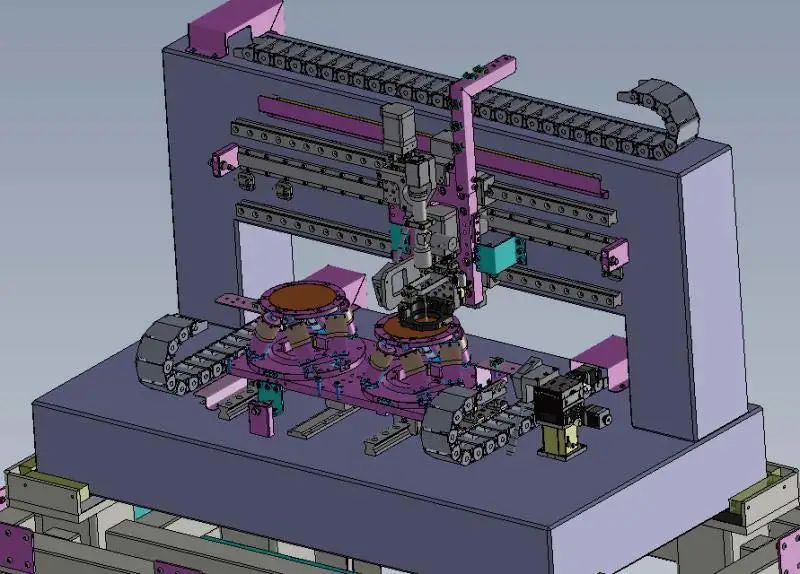
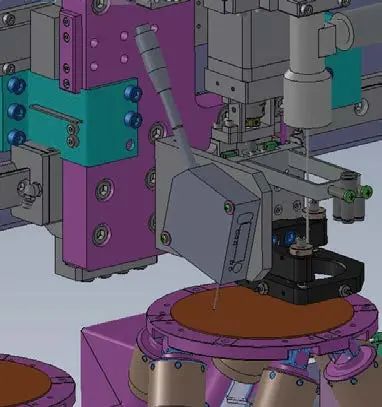
 微加工
微加工
六轴并联机器人拖动工件在机器视觉引到下进行微加工。
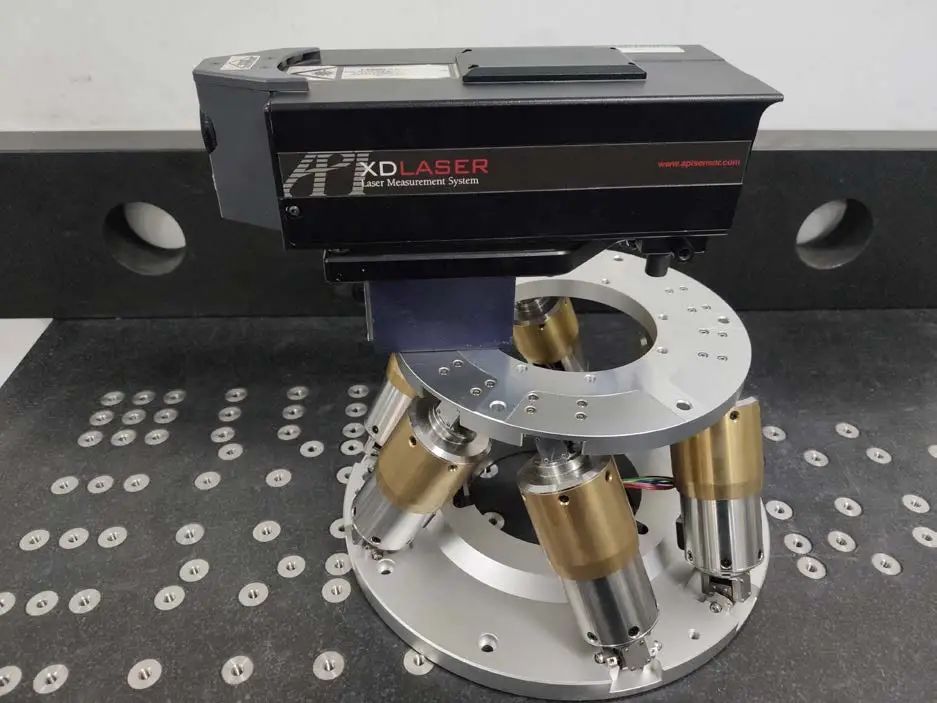
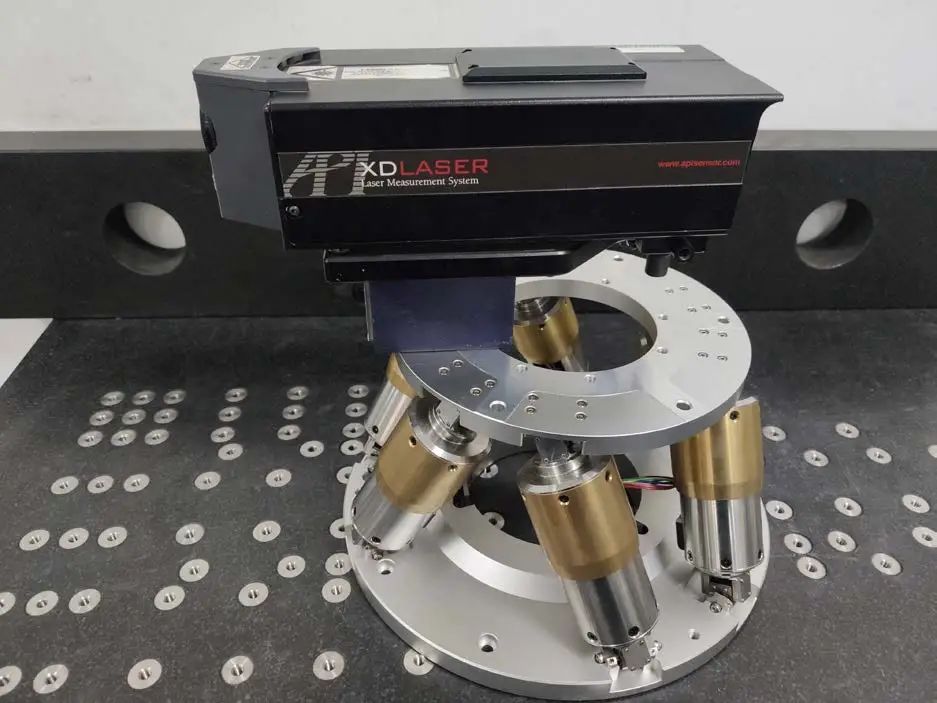
光路调整
六轴并联机器人拖动激光干涉仪,自动进行空间位置测量。
丨关于我们About Us
卓立汉光自1999年成立,在近二十年的不断努力下,已成为光电领域知名厂商。自主研发生产:荧光/拉曼光谱系统、光谱仪、太阳能电池检测仪器、光源及探测器、电控/手动精密位移台、调整架、光学平台、光学元件等系列产品。
更多详情:www.zolix.com.cn
欢迎咨询:010-56370168-696
邮箱:marketing@zolix.com.cn

扫码关注我们
查看更多精彩内容
全部评论(0条)
推荐阅读
-

- 精工品质,致力精准应用|HXP系列六轴并联机器人
- HXP 系列六轴并联机器人系统主要用于高精度的六自由度调整,尤其适合于空间精密对位、微小器件加工和装配、光通信器件调芯、晶片检验等场合。
-
- 光电课堂|新产品六轴并联机器人的应用
- 为多方位展现光电仪器研制领域的最 新成果,使客户进一步了解和熟悉光电产品及应用,北京卓立汉光仪器有限公司秉持“优质服务”的理念
-

- 【贴息贷款仪器推荐】卓立光机产品,致力精准应用
- 为了向大家更全面地介绍卓立汉光的明星产品,卓立汉光于10月25日举办了卓立汉光高性能系统产品推荐宣讲会,会议涉及到荧光,拉曼,光电探测,光电系统等多个领域,错过直播的朋友们,可以点击下方视频进行回看。
-
- 芒种 | 精工品质播种希望,科技赋能收获未来
- 芒种 | 精工品质播种希望,科技赋能收获未来
-

- ALIO六轴位移台Hybrid Hexapod®重新定义纳米
- 在这种混合设计中,每个轴可以定制,提供从毫米到1米以上的行程范围,同时保持纳米级的精度。
-

- 精工“卓”匠—带您了解对位平台系列(下)
- 今天小编为大家分享一篇三轴并联对位平台的综合介绍,让您轻松挑选一款合适的对位平台。全是干货,建议收藏!
-
- 精工“卓”匠—带您了解对位平台系列(中)
- 精密对位技术在微型机械、超精密加工、半导体以及光学等领域具有重要的地位并有着十分广泛的应用前景。
-
- 精工“卓”匠—带您了解对位平台系列(上)
- 为了满足很多用户对于对位平台的好奇心,今天小编为大家分享一篇三轴并联对位平台的综合介绍,让您轻松挑选一款合适的对位平台。全是干货,建议收藏!
-
- 如何选择单轴机器人(KK模组)合作品牌?
- KK模组的使用率还是很高的,那么我们应该怎么选择合作品牌呢?
-
- 【会议邀请】12月16日(本周六)!2023年精准医学可以创新技术应用会,亮点抢先看
- 【会议邀请】12月16日(本周六)!2023年精准医学可以创新技术应用会,亮点抢先看
-
- 品质与标准 | NavVis VLX精准捕捉历史建筑
- 测绘公司Terra Measurement通过使用NavVis VLX移动扫描系统,为高质量的地形土地测量开
-
- 转载 | 高光谱遥感数据处理系列(六)监督分类
- 非监督分类是一种面对数据本身的分类方法,与之相对应的:监督分类,则是面向先验知识的分类方法。
-
- 长三角致力打造自主可控全产业链机器人 需要重点发展哪些配套仪器?
- 传感器是机器人感知外部环境的“感官”,对于提高机器人的智能化水平至关重要。长三角地区应重点发展各种类型的高精度、高可靠性传感器,包括视觉传感器、力觉传感器、温度传感器等。
-
- 2016全球精准医疗(中国)峰会将于本周六召开(附日程安排)
- 12月3-4日,由枫林集团、美中医药开发协会(SAPA)、上海万怡会展管理股份有限公司联合主办的“2016全球精准医疗(中国)峰会”将在上海光大会展中心国际大酒店隆重召开。
-
- ALIO颠覆传统六轴位移台的创新型设计“点精度”
- 当今的机器人行业受到对更小组件和零件的追求的驱动,这些组件和零件通常具有亚微米级的功能,更可靠、可重复和准确的制造工艺。
-
- GNT系列液氮罐---安全稳定 智能精准!
- 中科都菱,为低温样本安全储存环境,用心打造了GNTBIO BANK系列不锈钢气相液氮罐,凭借其优异的产品性能和安全,赢得了市场的广泛认可,成为中科都菱液氮罐产品中的旗舰产品。
-

- 精工“卓”匠—带您了解光学平台之气浮隔振系列
- 北京卓立汉光仪器有限公司多年来,一直致力于精密光学仪器和精密机械运动与控制技术产品的研发与生产,为广大光电行业从业者提供针对性的产品及解决方案。
-

- 精工“卓”匠—带您了解电动滑台之直线滑台系列(一)
- 北京卓立汉光仪器有限公司多年来,一直致力于精密光学仪器和精密机械运动与控制技术产品的研发与生产,为广大光电行业从业者提供针对性的产品及解决方案。
-

- 小型五轴教学数控机床应用案例
- 目前国内的五轴数控机床大都以工业型、大型数控为主,小型化、桌面式的五轴数控系统几乎是一片空白。产品在高等院校、职业学院以及创客教育培训机构也有非常大的市场空间。



①本文由仪器网入驻的作者或注册的会员撰写并发布,观点仅代表作者本人,不代表仪器网立场。若内容侵犯到您的合法权益,请及时告诉,我们立即通知作者,并马上删除。
②凡本网注明"来源:仪器网"的所有作品,版权均属于仪器网,转载时须经本网同意,并请注明仪器网(www.yiqi.com)。
③本网转载并注明来源的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品来源,并自负版权等法律责任。
④若本站内容侵犯到您的合法权益,请及时告诉,我们马上修改或删除。邮箱:hezou_yiqi






参与评论
登录后参与评论