智能体 | 高校科研案例集锦Vol.2
从机器人技术研究之初,人们就追求创造出深入人类社会的智能机器,而仿生机器人在很多方面都接近或超越了人类的能力,它们可以更有效地执行危险、精密或高强度的任务,可对社会生产产生重大影响。因此,针对仿生机器人的研究也与日俱增。
近年来,众多高校运用凌云光·元客视界智能体位姿追踪系统进行仿生机器人验证实验,搭建仿生机器人落地前的最 后一个研究基地,为仿生机器人领域取得了许多重大进展。
本期分享
1、北理工仿生鼠SQuRo研发
四足机器人、模仿学习、运动性能评估
2、中科大象鼻软体机器人开发
仿生机器人、柔性机械臂、软体机器人
3、哈工大水黾机器人研发
仿生机器人、水上滑行机器人、运动姿态捕捉
北理工仿生机器鼠SQuRo
智能体位姿追踪系统
北京理工大学教授及其带领的仿生机器人团队以四足动物为仿生对象,设计研发了一款四足机器人——机器大鼠SQuRo。

/ 仿生大鼠SQuRo
在研发过程中,团队运用凌云光·元客视界智能体追踪解决方案对机器鼠的俯仰角、弯曲角、弯曲距离等动作姿态数据进行分析,以量化指标评估机器鼠性能。
运动姿态与性能分析
凌云光·元客视界方案工程师搭建了2mx2m的动作捕捉空间,对机器鼠的头部、背部、腿部、尾部等重要测试部位进行追踪。


/ 机器鼠运动测试
由于机器鼠尺寸细小且自重很轻,凌云光·元客视界提供了定制的3mm标记点,针对细小的结构精 准获取机器鼠的运动姿态信息。
仿生机器鼠-真实大鼠
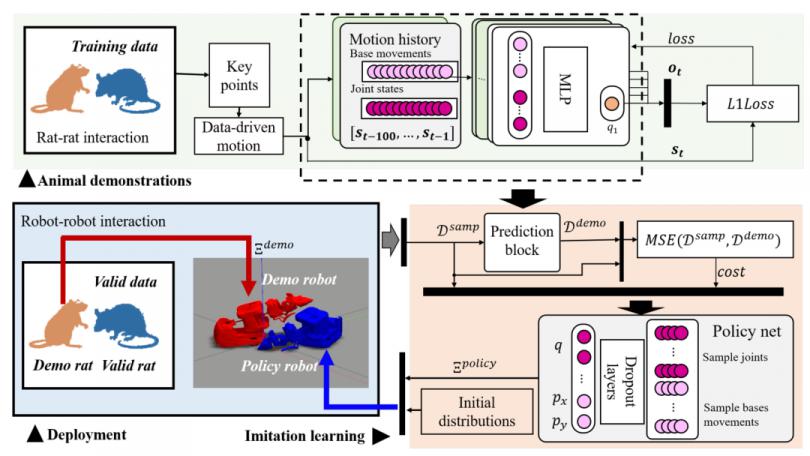
为了获取真实的动物行为反馈和决策制定过程,团队将机器鼠放入真实大鼠社会,并利用模仿学习(IL)的运动生成策略进行实验:
将两只大鼠放置于动作捕捉空间内,大鼠关节关键节点粘贴小型标记点,利用动作捕捉系统,分两组各采集20万帧大鼠交互数据作为训练集和验证集,用于在交互仿真系统中评估算法。
中科大象鼻软体机器人开发
智能体位姿追踪系统
由于日常任务的复杂性和不确定性,传统的刚性机器人需要添加复杂的感知、规划和控制系统。
中国科学技术大学计算机科学与技术学院科研团队受象鼻启发,利用软体机器人手臂本体柔顺性,运用凌云光·元客视界智能体追踪解决方案,开发了采用蜂巢气动网状结构(HPN)的机械臂,为机器人走进日常应用带来新的可能。

/ 软体机械臂完成日常任务
机械臂结构性能分析
为了实现高效、迅速响应的运动控制,研究人员提出一种分层控制系统,包括底层运动控制器、上层行为控制器以及顶层行为规划器,并设计了验证实验:

/ 分层控制系统验证实验架构
由于场地大小受限,标准镜头无法实现目标区域全域覆盖,实验采用广角镜头方案。研究人员利用光学动捕系统获取机械臂末端与把手的相对位姿,引导机械臂末端夹爪到达该区域抓住把手,执行相应任务。
通过实验结果可以看出,即使没有力传感器和准确的环境模型,这个采用分层控制系统的软体机械臂结构也可以完成开门、拉抽屉等日常生活环境中不同难度的交互任务。
哈工大水黾机器人研究
智能体位姿追踪系统
元客视界为哈尔滨工业大学实验室水池场地空间搭建了12台Swift30运动捕捉相机,可精确稳定地捕捉水面上仿生机器人关节运动信息。

/ 水黾机器人测试现场
由于机器人关节连杆较细,因此采用5mm标记点。调整腿部长度、角度等参数后,利用动捕系统采集机器人跳跃高度、距离和着陆角度数据。
感谢收看本期分享。目前已有百余所高校与科研机构与凌云光·元客视界达成合作,我们将持续与您分享更多智能体应用方向的案例集锦,以期为您的科研带来新的灵感和方向。
期待与您的下次相遇。
标签:高校科研案例集锦
全部评论(0条)
推荐阅读
-

- 智能体 | 高校科研案例集锦Vol.2
- 从机器人技术研究之初,人们就追求创造出深入人类社会的智能机器,而仿生机器人在很多方面都接近或超越了人类的能力,它们可以更有效地执行危险、精密或高强度的任务,可对社会生产产生重大影响。
-
- 金秋又见高教展 | 高校科研案例集锦Vol.3
- 希望为您的科研带来新的灵感和方向。
-
- 中科都菱 助力高校科研
- 第58·59届高教展在山城重庆如期举行,自疫情放开后,行业各种展会再展新姿,更多人开始走出家门观展学习,此次展会现场盛况空 前,参观者络绎不绝。
-
- 从培育到出成果,外泌体研究全流程干货集锦
- 对于炙手可热的外泌体赛道,Eppendorf特别汇总了配套产品解决方案。
-

- WIGGENS助力高校科研教学申报选型系列一(科研篇)-生物培养
- CO2培养箱用振荡器因为其良好的耐腐蚀性设计,用于在普通CO2培养箱中培养悬浮细胞;滚瓶培养是贴壁细胞培养的重要方式,可以放置于CO2培养箱中使用也可以单独使用
-
- BT-1001智能粉体特性测试仪
- BT-1001智能粉体特性测试仪
-
- BT-1001智能粉体特性测试仪
- BT-1001智能粉体特性测试仪
-

- BT-1001智能粉体特性测试仪
- BT-1001智能粉体物性测试仪是一种将粉体特性测试数值化、精确化的一种仪器。
-

- 政府千亿贴息贷款!高校如何用少量资金来撬动高校教学、科研及成果转化?
- 微反应,流动化学是化学化工行业的热门技术。该技术可以帮助普通高校在新的学科建设中脱颖而出。同时,微反应技术能帮助高校开展新的研究方向,其研究成果易于发表文章和成功实现成果转化。
-

- 网络直播|2022年扫描电镜自动化、智能化成果大赏(含案例集锦)
- 随着 SEM 技术的不断成熟,人们对扫描电镜(SEM)的要求也越来越复杂,比如增加更复杂的图像处理算法,提高分析大量数据的能力等。
-
- 瑞沃德明德奖学金助力多所高校优秀科研人才
- 明德奖学金2024上半年颁奖盘点。
-
- 论文奖励 | 福立“放榜”,助力高校科研,普惠莘莘学子
- 福立仪器将持续深耕于科学仪器的研发,做中国色质谱民族品牌的脊梁。同时,我们期待更多的科研工作者选择福立仪器的产品,发表更多优秀的科研成果!









①本文由仪器网入驻的作者或注册的会员撰写并发布,观点仅代表作者本人,不代表仪器网立场。若内容侵犯到您的合法权益,请及时告诉,我们立即通知作者,并马上删除。
②凡本网注明"来源:仪器网"的所有作品,版权均属于仪器网,转载时须经本网同意,并请注明仪器网(www.yiqi.com)。
③本网转载并注明来源的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品来源,并自负版权等法律责任。
④若本站内容侵犯到您的合法权益,请及时告诉,我们马上修改或删除。邮箱:hezou_yiqi







参与评论
登录后参与评论