微流体压力&真空泵OB1 MK3+用于软体机器人的运动控制
软体机器人技术是一个不断发展的领域,它依赖于模仿自然界中存在的软体的运动机制来实现平稳复杂的运动。在复杂环境中可以移动的“软体”中,蚯蚓,蛇,幼虫,章鱼和鳗鱼呈现了多种不同的策略,我们从这些策略中汲取了很多灵感。

软体机器人主要由易于变形的物质例如流体,凝胶和弹性体组成,其能够与环境材料相匹配。顺应性匹配的原则是指相互接触的材料应具有相似的机械刚度,以便均匀地分布内部载荷并Z小化降低界面应力集中。但是,该原理不适用于刚性机器人(E
= 10^9 Pa)与软质材料(E = 10^2-10^6
Pa)相互作用,从而导致损坏或机械固定(其中E是杨氏模量,它可以衡量固体材料的刚度)。这些与软质材料的相互作用被广泛传播,例如与天然皮肤,肌肉组织,脆弱的内部器官,还有生物,生物功能的人工复制等……由于机械顺应性的这种显着失配,很容易得出一个结论是:刚性机器人不适合人类亲密互动,甚至会造成危险。因此,需要一种与自然界中存在的材料和生物的弹性及流变特性相匹配的机器人,而这正是软体机器人可以提供解决方案的地方。
设计软体机器人需要在机械,电源和控制方面采用全新的模型。但是,重新思考材料,设计策略和制造技术应该会在许多领域如YL保健,人类援助,领域探索等中以宏观和微观尺度开辟软性机器人技术的新领域。
软体机器人当前有几种致动模式如燃烧驱动致动、光敏致动和气动网络致动。其中,气动网络致动模式目前大多数软体机器人采用的驱动模式。
气动网络致动(Pneumatic
Networks actuators,
PneuNets)是Z常见的软体机器人驱动模式,驱动器由软材料,弹性体组成,在其中加压流体可以在一系列通道和腔室内流动。
当这些腔室受压时,受限的流体会从材料内部产生应力,导致材料产生应变,变形,并使致动器运动。
通过调节嵌入式腔室的几何形状及其壁的材料属性,人们可以控制此运动的性质。
通常,流体弹性体机器人的每个部分都会弯曲,而这种弯曲是由于材料应变引起的。
如果机器人由单个均质的弹性体组成,则大多数膨胀将发生在Z薄的结构上,因此机器人的运动将取决于微流体回路的几何形状。 但是,具有不同弹性行为的材料也可以用于对致动器行为的进一步控制。

全部评论(0条)
推荐阅读
-

- 软体机器人的重要性突破:BIO X6 引领未来
- 软体机器人是技术创新的前沿领域,以其柔性和适应性正在改变各个行业。传统的刚性机器人在处理精细任务、与人类交互以及复杂环境中存在局限性。而软体机器人模仿生物的灵活性、灵巧性和弹性,使其成为广泛应用的理想
-
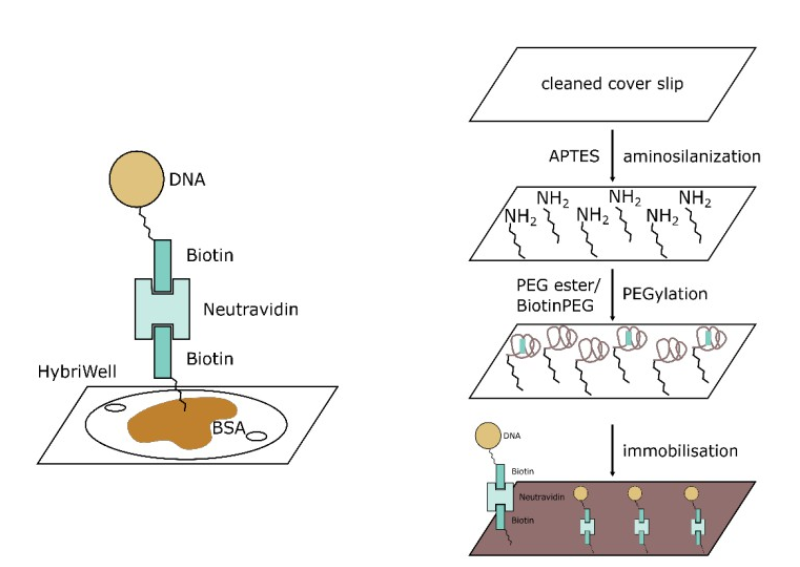
- 基于压力控制的微流控用于自动化单分子样品制备
- 样品制备是单分子实验的关键步骤,包括钝化微流体样品室、固定分子和设置实验缓冲条件。
-
- 中科院化学所研发“液滴机器人” 可用于多种类流体系统的操控
- 中科院化学研究所研发了一种能够采用程序化控制的“液滴机器人”。第一次实现了液滴的切割、移动、释放和旋转等复杂行为。

①本文由仪器网入驻的作者或注册的会员撰写并发布,观点仅代表作者本人,不代表仪器网立场。若内容侵犯到您的合法权益,请及时告诉,我们立即通知作者,并马上删除。
②凡本网注明"来源:仪器网"的所有作品,版权均属于仪器网,转载时须经本网同意,并请注明仪器网(www.yiqi.com)。
③本网转载并注明来源的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品来源,并自负版权等法律责任。
④若本站内容侵犯到您的合法权益,请及时告诉,我们马上修改或删除。邮箱:hezou_yiqi
最新话题
最新资讯
- 【设备更新系列】差示扫描微量热仪(DSC)篇
- 2021-2023年度用户优秀期刊论文获奖文章推介
- 金秋沪上迎宾客,坦诚交流结硕果——第16届马尔文帕纳科X射线用户会圆满收官
- 科技之光点亮ARABLAB,博鹭腾迪拜之旅精彩回顾!
- IT8628 销售 电子负载 IT8628
- Nature Communications通讯作者郑建树:专注解析结瘤固氮的分子机制,对待科研更要知其所以然!
- 巴西血清拍照打卡交作业啦 | Get Gibco周边so easy!
- 数据赋能,共创未来 | 沃特世-迪必尔生物工艺自动化合作实验室成立
- 第二轮“双周奖”公布!新增“挑战奖”、月度冠军专访、参赛高光时刻……更多精彩请查收!
- PicoQuant公司的PicoHarp 300停产公告
作者榜









参与评论
登录后参与评论