案例分享 | 哈工大高会军教授、李湛副教授团队新型矢量旋翼飞行器研发
旋翼飞行器因其出色的垂直起降能力、空中悬停能力,已经在航拍、植保、环境检测等领域发挥了巨大作用。然而,传统旋翼飞行器的姿态控制和位置控制存在耦合:在进行位置移动时,需要先调整姿态进而调整位置;而调整姿态时,位置会因为姿态的变化而发生改变。
姿态和位置的耦合,导致旋翼飞行器末端执行器的工作空间和可操作性受限,在需要与外界进行接触交互时,存在一定的短板。
针对当前普通旋翼飞行器调整姿态时姿态与位置的解耦问题,哈工大高会军教授、李湛副教授带领杨义鹏、李宗霖等研究生设计了一种新型矢量旋翼飞行操作平台,解决了普通飞行器的旋翼旋转轴固定,无法很好地抵抗所搭载的机械臂操作时引入的扰动问题,并基于智能体位姿追踪系统进行了室内飞行实验。
矢量旋翼飞行器机械结构设计
研究团队进行了矢量旋翼飞行器机械结构设计,结构设计包含动力平台和遥操作装置。
遥操作装置:机械臂
动力平台:由六个可双轴倾转的旋翼驱动装置构成;舵机带动无刷电机,无刷电机驱动旋翼转动获得多个矢量升力,使升力方向可以在三维空间变化;多个矢量升力的合力提供控制力和控制力矩
与传统多旋翼无人机不同,平台的每个螺旋桨方向均可独立转动,通过实时调整每个旋翼的拉力大小和方向,使得操作平台能够实现任意姿态悬停与任意方向平移飞行,同时能够对外输出作用力和扭矩,做出倾斜旋转同时倾斜移动的动作。
旋翼转动提供矢量升力,使飞行器保持悬停旋转
室内空中操作演示实验
由于需要单独控制飞行器每个螺旋桨的方向和拉力大小,且平台在空中悬停飞行时没有可支撑的基座,系统模型复杂、内外扰动强烈、控制分配难度高,实现高性能的操作效果具有极高挑战性。
为了验证操作可行性,研究团队进行了矢量旋翼飞行器室内空中操作演示实验。实验设置为机械臂遥操作装置完成安装灯泡任务,任务过程要求矢量旋翼飞行器在保持倾斜悬停姿态的同时完成旋转,并完成灵巧精细的拧灯泡动作。
安装灯泡
实验中,通过在飞行器机身上粘贴FZMotion反光标记点,采集任务过程中飞行器位姿变化结果,通过可视化结果评估飞行器的6自由度轨迹跟踪、抑制干扰、末端执行器悬停置物的能力。
FZMotion软件采集飞行器位姿变化结果
在研制样机过程中,团队突破了矢量旋翼飞行器高精度位姿控制、面向接触式交互的飞行操作平台强抗扰鲁棒控制、基于实景重建与遥操作的人机交互控制等系列关键技术,实现了操作平台的良好控制效果。
这一设计方法大幅扩展了无人机的应用范围,在电网检修、风电叶片探伤修复、桥梁建筑关键结构与压力容器巡检探伤等场景具有广泛的技术转化及产业化前景。
在此基础上,团队未来将围绕该方向开展持续研究,将推动无人机形态与应用从“旁观者(飞行的相机)”向“操作者(飞行的机械臂)”的新变革,助力低空经济新发展。
关于「」
是凌云光设立的全资子公司,主要面向元宇宙虚拟现实、Web3.0时代数字人、沉浸媒体、全息通信、计算光学成像等应用,已形成光场建模、运动捕捉、全景成像、XR 拍摄等在内的产品布局。
FZMotion智能体位姿追踪系统是自主开发的运动捕捉采集与分析系统,可以实时跟踪测量并记录三维空间内点的轨迹、刚体的运动姿态以及人体动作,空间定位精度可以达到亚毫米级。
FZMotion动捕系统在无人机室内定位、仿生机器人运动规划、机械臂示教学习、气浮台位姿验证、水下运动捕捉等领域得到广泛应用,目前已经与清华大学、中国科学技术大学、北京大学、北京理工大学、哈尔滨工业大学等高校开展合作。致力于为高校提供完备的解决方案,助力科研发展。
参考文献:
Y. Yang, X. Yu, Z. Li and M. V. Basin, "A New Overactuated Multirotor: Prototype Design, Dynamics Modeling, and Control," in IEEE Transactions on Industrial Electronics, vol. 71, no. 8, pp. 9449-9459, Aug. 2024, doi: 10.1109/TIE.2023.3314924.
Z. Li, Y. Yang, X. Yu, C. Liu, O. Kaynak and H. Gao, "Fixed-Time Control of a Novel Thrust-Vectoring Aerial Manipulator via High-Order Fully Actuated System Approach," in IEEE/ASME Transactions on Mechatronics, doi: 10.1109/TMECH.2024.3400015.
全部评论(0条)
推荐阅读
-
- 案例分享 | 哈工大高会军教授、李湛副教授团队新型矢量旋翼飞行器研发
- FZMotion助力高校科研
-
- 论文分享 | 北京科技大学基于矢量场的微型仿生扑翼飞行机器人的路径跟踪
- FZMotion助力高校科研
-

- 【名家案例】Kappe教授团队低成本合成硫代吗啉
- 尽管大多数路线使用低成本起始材料,但会产生氮芥类化合物,使得该类化合物在实验室环境中进行放大具有一定的安全性挑战。
-

- 北京大学李毓龙教授团队 | 光遗传与光纤记录技术培训班,报名开始啦!
- 探索清醒自由活动状态下动物行为功能的神经编码机制,是当代神经科学研究中的至关重要课题。
-
- 百欧林用户成果分享 | 广东工业大学邱学青教授团队
- 耗散型石英晶体微天平分析仪是广东工业大学邱学青教授团队在表界面领域开展科研的最重要技术手段之一,目前已在包括Advanced Energy Materials、Adv Funct Materials等杂志发表科学论文近50 篇。
-

- 哈工大高继慧教授:基于脉冲电催化强化2eORR合成H2O2
- 过氧化氢(H2O2)是一种广泛用于漂白消毒、化学合成、废水处理的绿色氧化剂,在能源和环境领域具有很高的应用前景。
-
- 北京大学李毓龙教授团队 | 10月光遗传与光纤记录技术培训班两期连办,火热报名中!
- 光遗传与光纤记录技术培训班,报名开始啦!
-

- 继李兰娟团队发布成果 又有科研团队筛选出五种药物
- 华为云科研团队宣布,筛选出五种可能对2019新型冠状病毒(2019-nCoV)有效的抗病毒药物。
-

- 中科院理化所王树涛教授团队/北航刘欢教授团队Nature Materials:仿松塔超慢运动
- 中国科学院理化技术研究所王树涛研究员团队和北京航空航天大学刘欢教授团队合作,重新审视松塔的吸湿运动,揭示了松塔湿度响应的超慢运动的奥秘
-
- 学者来访||哈工大周春圣教授莅临苏州纽迈进行交流合作!
- 2023年12月25日-26日,哈工大土木工程学院周春圣教授莅临苏州纽迈分析仪器股份有限公司,参观了苏州纽迈新建落成的厂房、设备研发和生产基地,与纽迈董事长杨培强先生交流了核磁法在水泥基材料广阔的应用前景。
-
- 学者来访||哈工大周春圣教授莅临苏州纽迈进行交流合作!
- 2023年12月25日-26日,哈工大土木工程学院周春圣教授莅临苏州纽迈分析仪器股份有限公司,参观了苏州纽迈新建落成的厂房、设备研发和生产基地,与纽迈董事长杨培强先生交流了核磁法在水泥基材料广阔的应用前景。
-
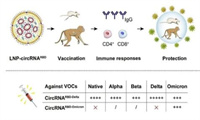
- 中国团队发表新型疫苗结果
- 以小鼠和恒河猴为模型的动物实验显示,注射环状RNA新冠疫苗诱导对新冠病毒变异毒株产生了有效、广谱的保护
-

- 【案例分享】看这项绿色技术如何助力药品研发和生产
- 由于ACQUITY UPC2的出色性能,2015版中国药典附录已将SFC法收录其中。而全 球知名的跨国制药企业默沙东也将UPC2应用于其GMP分析方法。获得如此青睐,那么UPC2的优势到底在哪里呢?
-
- 哈工大(深圳)魏军团队 AFM综述:3D打印超级电容器 - 技术、材料、设计及应用
- 。区别于传统的等材和减材制造技术, 3D打印技术可以实现几乎任何所需的立体几何形状,不需要所谓的模具或光刻掩模。
-

- 2022新型疫苗研发峰会
- 2022新型疫苗研发峰会将于5月14-15日在上海召开。









①本文由仪器网入驻的作者或注册的会员撰写并发布,观点仅代表作者本人,不代表仪器网立场。若内容侵犯到您的合法权益,请及时告诉,我们立即通知作者,并马上删除。
②凡本网注明"来源:仪器网"的所有作品,版权均属于仪器网,转载时须经本网同意,并请注明仪器网(www.yiqi.com)。
③本网转载并注明来源的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品来源,并自负版权等法律责任。
④若本站内容侵犯到您的合法权益,请及时告诉,我们马上修改或删除。邮箱:hezou_yiqi







参与评论
登录后参与评论