机器视觉里的较量|3D机器视觉
立体视觉、结构光、激光三角测量以及TOF选手闪亮登场!
3D代表队:异军突起
随着科技的不断进步,特别是工业4.0的到来,广泛采用工业机器人的自动化生产线成为制造业的核心装备。让我们对3D成像解决方案的需求也逐渐增加,传统的2D视觉已无法满足对复杂对象识别和尺寸测量应用日益准确的测量要求。而且,人与机器人协同工作逐渐取代单一人工操作成为主流,而处理复杂的交互情况是传统2D视觉做不到的。因而,3D视觉逐渐崛起成为当今各行业的大势。
现如今,3D视觉有四种主要技术:立体视觉,结构光3D成像,激光三角测量和ToF。下面,就让主页妹好好为大家介绍一下各位选手:
立体视觉
目前立体视觉常用于3D电影中,它通过安装两个相机分别从不同的视角拍摄同一景物,通过对图像特征点的提取和匹配,建立被拍摄景物的几何模型,通过双目视差原理将两台摄像机拍摄的景物协同播放,形成相应的立体3D影像。这类似于我们的大脑如何以视觉方式测量距离。因此,将认知过程转换为系统需要大量的计算工作。
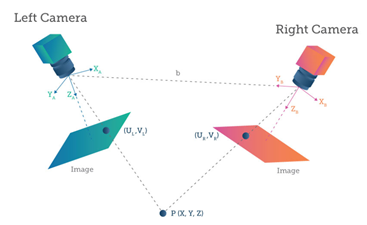
▲立体视觉形成3D影像原理
结构光
结构光是将预定的光图案投影到物体上,然后相机捕捉物体反射的光来分析获得物体的深度信息。结构光对帧速没有概念上的限制,没有运动模糊,而且它对多路径接口具有鲁棒性。
结构光是主动照明,这需要甄选符合条件的相机,还需要透镜与图案投影仪之间精确且稳定的机械对准。其存在失准的风险,并且反射的图案对环境中的光学干扰敏感,仅限于室内应用。
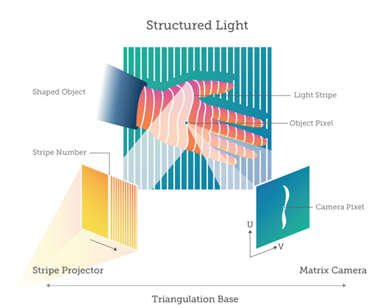
▲结构光测量原理
激光三角测量
激光三角测量系统使用激光将物体上的数千个点照亮,并且使用相机精确定位每个点。它通过测量一条线的几何偏移,该线的值与物体的高度有关。由于激光点、相机和激光形成三角形,因此该技术被称为三角测量,该系统甚至可以使用三角函数来计算出被测物的深度。
激光三角测量通常用于需要高精度、稳定和低温漂移的位移和位置监控的应用中。但是,该技术仅覆盖很短的范围,对环境光敏感,并且仅限于扫描应用。还需要复杂的算法和校准。
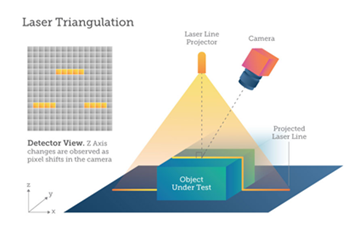
▲激光三角测量原理
飞行时间(TOF)
飞行时间(ToF)扫描通过测量激光发出的光在相机和物体之间传播所花费的时间来确定物体的深度,长度和宽度。典型的TOF 3D扫描系统每秒可测量物体上10,000至100,000个点的距离。该系统具有较小的纵横比,使用一台相机一次便可测量完毕,并且在环境光条件下也能很好地运行。缺点包括需要主动照明同步以及潜在的多径干扰和距离混叠。

▲飞行时间(TOF)测量原理
十项全能:Battle,就是要全面
主页姐:上面,我们介绍3D视觉代表队选送的四位选手,接下来我们就开启十项全能比赛吧!各位选手各就各位,RACE START~

不重要的比赛结果
总的来说,无论是立体视觉、结构光、激光三角测量还是TOF,没有哪种技术是更好的,只有哪种技术是更适合的。主页妹想到,这时候视友们也会问了,如何选择面对3D视觉需求选择更适合的技术呢?当然是—找凌云光啊!20多年机器视觉经验,为您臻选出更好的解决方案!
相关产品



全部评论(0条)
推荐阅读
-
- Vision China 2024机器视觉技术展览会【上海】
- Vision China 2024机器视觉技术展览会Vision China 2024机器视觉技术展览会时间:
-
- AI+VISION | 专业机器视觉助力锂电极限制造
- 更精准、更可靠、更智能的视觉检测方案!
-
- 【圆满落幕】Vision China 2024(上海)机器视觉展精彩回顾
- 在这个充满创新与变革的盛夏时节,Vision China 2024(上海)机器视觉展于今日在上海新国际博览中心圆满落下帷幕。
-
- 【圆满落幕】Vision China 2024(上海)机器视觉展精彩回顾
- 在这个充满创新与变革的盛夏时节,Vision China 2024(上海)机器视觉展于今日在上海新国际博览中心圆满落下帷幕。




①本文由仪器网入驻的作者或注册的会员撰写并发布,观点仅代表作者本人,不代表仪器网立场。若内容侵犯到您的合法权益,请及时告诉,我们立即通知作者,并马上删除。
②凡本网注明"来源:仪器网"的所有作品,版权均属于仪器网,转载时须经本网同意,并请注明仪器网(www.yiqi.com)。
③本网转载并注明来源的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品来源,并自负版权等法律责任。
④若本站内容侵犯到您的合法权益,请及时告诉,我们马上修改或删除。邮箱:hezou_yiqi







参与评论
登录后参与评论